1Īóę²čį
─XūõųąĪóęŌ═Ō╩┬╣╩║═└Ž²g╗»Ą╚įņ│╔Ą──Xōpé¹╗╝š▀öĄ┴┐┤¾Ę∙Č╚į÷╝ėŻ¼ė╔─Xōpé¹ę²ŲĄ─╩ų▀\äė╣”─▄šŽĄKų▒Įėė░Ēæ╗╝š▀Ą─╔·╗Ņ┘|┴┐ĪŻé„ĮyĄ─ų╬»¤╩ųČ╬ų„ę¬ę└┐┐┐ĄÅ═ßtĤ▌oų·╗╝š▀ĻP╣Ø╗ŅäėČ╚║═╝Ī┴”ė¢ŠÜŻ¼Ą½Ųõė¢ŠÜą¦╣¹╩▄ßt╔·Įø“×║═śIäš╦«ŲĮ╝░ė¢ŠÜĢrķgĄ╚ę“╦žĄ─ė░ĒæĪŻę“┤╦ėą║▄ČÓ蹊┐š▀čą░l┴╦ŽÓĻPĄ─┐ĄÅ═ė¢ŠÜįOéõ▌oų·╗╝š▀ė¢ŠÜęįųžą┬½@╚Īų½¾wĄ─▀\äė╝╝─▄[1]ĪŻ

įńŲ┌│÷¼FĄ─╩ų╣”─▄┐ĄÅ═įOéõ╩ŪäéąįĄ─Ż¼ŲõäéČ╚═∙═∙▀h┤¾ė┌╚╦╩ų╝Ī╚ŌĮM┐ŚŻ¼į┌┼c╚╦Ą─Į╗╗ź▀^│╠ųąŻ¼ī”╚╦╩ųĄ─▀mæ¬ąįŪĘ╝čŻ¼ļm╚╗┐╔ęįę└┐┐é„Ėą║═┐žųŲīŹ¼F░▓╚½Į╗╗źŻ¼Ą½╝╝ągļyČ╚Ė▀Ż¼ŽĄĮy│╔▒Š▌^Ė▀Ż¼▓╗└¹ė┌═ŲÅVæ¬ė├ĪŻČ°Į³Äū─Ļ│÷¼FĄ─▄ø¾wÖCąĄ╩ų│õĘų└¹ė├║═░lō]Ė„ĘN╚ßąį▓─┴ŽĄ─╚ßĒśąįŻ¼╝░ŲõĘŪŠĆąįĪóš│ÅŚąį║═▀t£■╠žąįĄ╚į┌▄ø¾w╩ų▀\äė║═┐žųŲųąØōį┌Ą─Ī░ÖCąĄųŪ─▄Ī▒ū„ė├Ż¼ĮĄĄ═┐žųŲĄ─Å═ļsČ╚Ż¼īŹ¼FĖ▀ņ`╗ŅąįĪóÅŖ▀mæ¬ąį║═┴╝║├Į╗╗źąįŻ¼į┌ßt»¤┐ĄÅ═ŅIė“ėąųžę¬æ¬ė├ārųĄ[2]ĪŻ
┤╦═ŌŻ¼┼R┤▓ßtīWę▓▒Ē├„Ż¼╗╝š▀ų„äėģó┼c┐ĄÅ═ė¢ŠÜĄ─ą¦╣¹ę¬▒╚▒╗äė┐ĄÅ═’@ų°ĪŻ─┐Ū░Ż¼─X-ÖCĮė┐┌Ż©Brain-Computer InterfaceŻ¼BCIŻ®╝╝ąg×ķ╗╝š▀ų„äė┐ĄÅ═ė¢ŠÜ╠ß╣®┴╦ę╗ĘNą┬═ŠÅĮŻ¼╝┤į┌╔·╬’ļŖą┼╠¢┼c═Ō▓┐įOéõų«ķgķ_▒┘┴╦ę╗Śl╚½ą┬Ą─ą┼ŽóĮ╗┴„═©Ą└ęįĖ─╔Ų┤¾─XŲżīėĄ─┐╔╦▄ąį▓ó╗ųÅ═╩▄ōp╔±Įø╣”─▄╗“┤·╠µ▓┐Ęų╣”─▄[3]ĪŻ═©▀^ų„▒╗äė┐ĄÅ═ė¢ŠÜĄ─╗źŽÓ┼õ║ŽŻ¼┤┘▀M╗╝š▀ĖąėX▀\äėŁh┬ĘĄ─ųžĮ©Ż¼╩╣Ą├ų„äė┐ĄÅ═ė¢ŠÜ│╔×ķ─X┐ŲīWĪó╔·╬’ßtīW╝░┐ĄÅ═╣ż│╠ĪóĘ┬╔·īWĄ╚ŅIė“ūŅ╗Ņ▄SĄ─蹊┐ĘĮŽ“ų«ę╗ĪŻ
2Īó╩ų▓┐▀\äėęŌłDūRäeĘĮĘ©
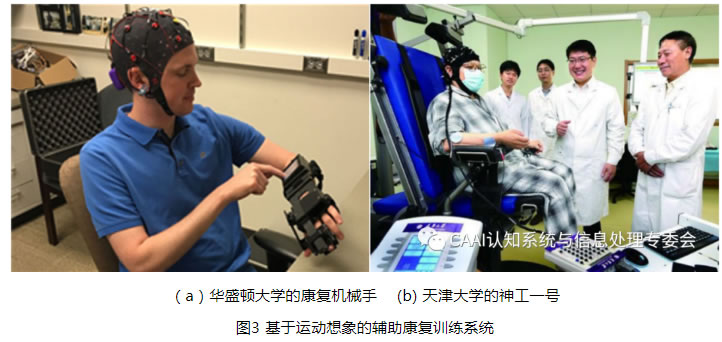
├└ć°äP╦╣╬„ā”┤¾īWDalyĄ╚═©▀^▀\äėŽļŽ¾Öz£y┤¾─XŲżīė╔±Įøį¬Ą─╝ż╗ŅŪķørŻ¼▒Ē├„BCIŽĄĮy─▄ėąą¦Ąž▌oų·╗╝š▀šT░l─X╣”─▄ųž╦▄▓óĮĄĄ═┤¾─XŲżīėĄ─«É│Ż╝ż╗ŅĪŻ╝┤ų„äėĄ─▀\äėĖąų¬║═▒╗äė═Ō▓┐įOéõŽÓĮY║Žą╬│╔ų„▒╗äė┐ĄÅ═ė¢ŠÜŽĄĮyŻ¼īóėą└¹ė┌╩▄įćš▀ų½¾wĄ─▀\äė╣”─▄┐ĄÅ═[4]ĪŻ╚A╩óŅD┤¾īWBundyĄ╚═©▀^ĮĪé╚╩ų▓┐äėū„▀\äėęŌłD▌oų·╗╝š▀┐žųŲ═Ō╣Ū„└ÖCąĄ╩ųŻ¼īŹ¼F┴╦╗╝š▀į┌╚š│Ż╔·╗Ņųął╠ąą┐ĄÅ═ė¢ŠÜ[5]Ż¼╚ńłD3(a)╦∙╩ŠĪŻų„▒╗äė┐ĄÅ═ė¢ŠÜŽĄĮy▓╗āH─▄▌oų·š²│Ż╩▄įćš▀┐ĄÅ═ė¢ŠÜŻ¼Č°Ūęį┌╗╝š▀Ą─┐ĄÅ═ė¢ŠÜųąę▓╚ĪĄ├┴╦ę╗Č©Ą─▀Mš╣ĪŻĄ┬ć°łD┘eĖ∙┤¾īWV©órkutiBĄ╚═©▀^▀\äėŽļŽ¾┐žųŲMIT-MANUSÖCŲ„╚╦▌oų·╗╝š▀╔Žų½ł╠ąą┐ĄÅ═ė¢ŠÜŻ¼ĮY╣¹▒Ē├„╔Žų½▀\äė╣”─▄Ą├ĄĮ├„’@Ė─╔Ų[6]ĪŻ╚ńłD3(b)╦∙╩Š╠ņĮ“┤¾īW├„¢|Į╠╩┌łFĻĀ═©▀^╗╝š▀ųŌĻP╣ØŪ³-╔ņ▀\äėŽļŽ¾┐žųŲĪ░╔±╣żę╗╠¢Ī▒┐ĄÅ═ÖCŲ„╚╦▌oų·ųŌĻP╣ØĄ─┐ĄÅ═▀\äėŻ¼į÷ÅŖ┴╦┐ĄÅ═ė¢ŠÜą¦╣¹ĪŻ╬„░▓Į╗═©┤¾īWąņ╣Ō╚AĮ╠╩┌łFĻĀ蹊┐┴╦─┐ś╦šTī¦Ą─▀\äėŽļŽ¾┤╠╝żĘČ╩ĮŻ¼ūC├„┴╦ėą─┐ś╦ī¦Ž“Ą─▀\äėŽļŽ¾į÷ÅŖ┴╦ī”┤¾─XŲżīėĄ─╝ż╗Ņ▓óĖ─╔Ų▀\äėŽļŽ¾Ą──▄┴”[7]ĪŻĒfČ„ų▌┴ó┤¾īWWhyteĄ╚▀Mę╗▓Į╠ß│÷┴╦ęÄĘČ┐ĄÅ═ė¢ŠÜ¾wŽĄ┐╔Ä═ų·╗╝š▀ų„äėģó┼c┐ĄÅ═ė¢ŠÜ[8]ĪŻ
×ķ┴╦╠ßĖ▀▀\äėŽļŽ¾äėū„┼c╦∙ąĶꬥ─┐ĄÅ═ų½¾wĄ─ų▒ĮėŽÓĻPąįŻ¼▒ŠšnŅ}ĮMįOėŗ┴╦╩ų▓┐╔ņ-╬šäėū„ų▒ĮėŽÓĻPĄ─▀\äėŽļŽ¾║═äėū„ė^▓ņŽÓĮY║ŽĄ─Å═║ŽĘČ╩ĮīŹ“ׯ¼ęįīŹ¼FĖ³║├Ą─╩ų▓┐ų„äė┐ĄÅ═ĪŻ▀\äėŽļŽ¾╩Ūūī╩▄įćš▀╚źŽļŽ¾─│ę╗éĆäėū„Ż¼▓╗ė├«a╔·╚╬║╬╝Ī╚Ō╗ŅäėŻ¼š{äėų„ė^ęŌ─Ņį┌ą─└Ē╔ŽĘ┤Å═─ŻöM╗“Å═¼FŽÓæ¬äėū„ĪŻäėū„ė^▓ņ╩Ūūī╩▄įćš▀ė^┐┤╚š│Ż╔·╗Ņ╩ųĄ─╗∙▒Šäėū„Ż©╚ń─©ū└ūėĪóŽ┤ę┬Ę■Ą╚ęĢŅläėū„Ż®Ż¼╚╗║¾▒M┴”╚ź─ŻĘ┬ęĢŅlųą╦∙│÷¼FĄ─äėū„ĪŻ═©▀^ERSPŻ©ĢrķgŽÓĻPūVö_äėŻ®Īó─XĄžą╬łD║═─X╣”─▄ŠWĮjėŗ╦ŃĘų╬÷┴╦╔ņ-╬šäėū„▀\äėŽļŽ¾║═äėū„ė^▓ņī”┤¾─XŲżīėĄ─╝ż╗ŅęÄ┬╔ĪŻ

īŹ“×ĮY╣¹▒Ē├„┼c╔ņ-╬šäėū„ų▒ĮėŽÓĻPĄ─▀\äėŽļŽ¾║═äėū„ė^▓ņŽÓĮY║ŽĄ─Å═║ŽĘČ╩ĮŻ¼į÷ÅŖ┴╦┼c╔ņ-╬šäėū„ų▒ĮėŽÓĻP┤¾─XŲżīėĄ─╝ż╗Ņ│╠Č╚Ż¼░l¼F┴╦Ī░╔ņķ_Ī▒äėū„ī”æ¬─▄┴┐║═╝ż╗Ņ¼FŽ¾Š∙┤¾ė┌Ī░╬š╚ŁĪ▒äėū„ĪŻīó▀\äėŽļŽ¾║═äėū„ė^▓ņŽÓĮY║Ž┐╔į÷ÅŖī”┤¾─XŲżīėĄ─╝ż╗Ņ│╠Č╚Ż¼ėąų·ė┌╩ų▓┐▀\äė╣”─▄šŽĄKĄ─╗ųÅ═ĪŻ▓óŪęīóīŹ“×ųą▓╗═¼ĘČ╩ĮŽ┬╔ņ-╬šäėū„ī”┤¾─XŲżīėĄ─╝ż╗ŅęÄ┬╔×ķ╗∙ĄAŻ¼╠ß│÷╗∙ė┌ąĪ▓©ūāōQ║═╣▓┐šķg─Ż╩Į╠ß╚Ī╔ņ-╬šäėū„EEG╠žš„Ą─╦ŃĘ©Ż¼į┘═©▀^ŠĆąį┼ąäeĘų╬÷ī”╔ņ-╬šäėū„Š½╝ÜęŌłD▀MąąūRäe[9]ĪŻ
łD7 ąĪ▓©ūāōQ║═╣▓┐šķg─Ż╩Į╦ŃĘ©Ęų╬÷┴„│╠łD
3Īó▄ø¾w┐ĄÅ═╩ų╠ūįOėŗųŲū„
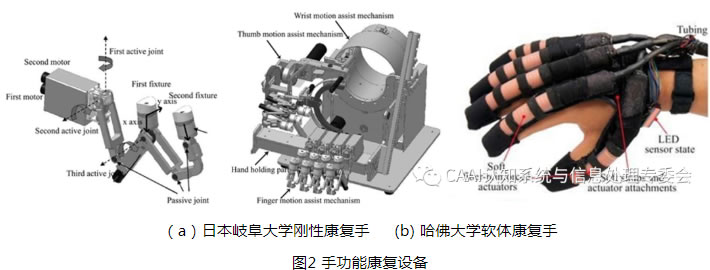
¼FėąĄ─▄ø¾w┐ĄÅ═╩ų┤¾ČÓ▓╔ė├└ŁŠĆ“īäėĪóę║ē║“īäė║═ÜŌē║“īäėĪŻĒnć°╩ūĀ¢┤¾īWĄ─HyunKi InĄ╚╚╦[10]įOėŗ┴╦╚ńłD8Ż©aŻ®╦∙╩ŠĄ─ę╗ĘN└ŁŠĆ“īäėĄ─▄ø¾w┐ĄÅ═╩ųExo-GloveŻ¼į┌╚ßąį┐Ś╬’╩ų╠ūĄ─ųĖ╠ū╩ų▒│é╚║═╩ųšŲé╚õüįO└@ąįĮī┘ĮzŻ¼“īäėļŖÖC└Łäė└@ąįĮī┘ĮzŻ¼╝┤┐╔▌oų·╩ųųĖĄ─═Ļ│╔Ū³Ū·║═╔ņš╣äėū„Ż¼ųĖ─¾┴”┴┐×ķ20NŻ¼šŲ╬š┴”┴┐×ķ40NŻ¼“īäė┐žųŲŽĄĮy┼c╩ų╠ū▒Š¾wĘųļx╩╣╩ų╠ūāHųž196gŻ¼ūŅ┤¾┐╔ęįūź╬šų▒ÅĮ76mmĄ─╬’¾wĪŻ╣■Ę┤¾īWĄ─PanagiotisĄ╚╚╦[11]įOėŗ┴╦╚ńłD8Ż©bŻ®╦∙╩ŠĄ─ę╗┐Ņųž┴┐×ķ285gĄ─▌oų·╗╝š▀ūź╬šĄ─ę║ē║“īäėĄ─▄ø¾w┐ĄÅ═╩ųŻ¼▓ó┼õéõ┴╦ę╗éĆųž┴┐×ķ3.3kgĄ─ę║ē║“īäė┐žųŲ▒Ńöy╩Įč³░³ĪŻįōę║ē║▄ø¾w┐ĄÅ═╩ųĄ─▄ø¾w“īäėŲ„Ż¼ė╔└wŠSį÷ÅŖ▓─┴ŽųŲū„Ą─│╔ą═ÅŚąįŪ╗┼c╝s╩°ŠĆĪóŽ▐ųŲīėĮM║ŽųŲū„Ż¼į┌į÷ē║Ģr┐╔═Ļ│╔Ū³Ū·Īó┼ż▐DĪó╔ņķLĄ╚▀\äėŻ¼┐╔ęį▌oų·╩ųųĖ═Ļ│╔ų„äėŪ³Ū·▀\äė║═▒╗äė╔ņš╣▀\äėĪŻ╣■Ę┤¾īWĄ─Stacey LyneĄ╚╚╦[12]└¹ė├3D┤“ėĪ─ŻŠ▀▀Mąą▄ø▓─┴ŽØ▓ĶTųŲū„ÜŌäė▄ø¾w“īäėŲ„Ż¼Å─Č°ųŲū„│╔╚ńłD8Ż©cŻ®╦∙╩ŠĄ─ųž┴┐╝s×ķ160gĄ─ PneuNet ▄ø¾w┐ĄÅ═╩ųĪŻįōÜŌäė▄ø¾w“īäėŲ„į┌┐┐Į³╩ų▒│é╚ŪČ╚ļÅŚąį─Ż┴┐┤¾Ą─Ž▐ųŲīėŻ¼╩╣“īäėÜŌŪ╗į┌į÷ē║ĢrŽ“ÅŚąį─Żą═┤¾Ą─ę╗é╚ÅØŪ·Ż¼īŹ¼F▌oų·╩ųųĖų„äė“īäė▀\äėŻ¼ÜŌē║×ķ0.45MpaĢrųĖ╝Ōē║┴”×ķ1.2NĪŻ

Ķbė┌└ŁŠĆ╩Į▄ø¾w┐ĄÅ═╩ųĄ─“īäėé„äėŽĄĮy▌^Å═ļsĪóī”╩ųĄ─ē║Ų╚Ėą▌^ÅŖŻ¼ę║ē║▄ø¾w┐ĄÅ═╩ųųž┴┐▌^┤¾Īóėąą╣┬Č╬█╚ŠĄ─’LļUŻ¼▒ŠšnŅ}ĮMī”ųž┴┐Ė³▌pĪó│╔▒ŠĖ³Ą═Īó“īäė┐žųŲ▌^×ķ║åå╬Ą─ÜŌäė▄ø¾w┐ĄÅ═╩ųš╣ķ_┴╦蹊┐ĪŻŪ░Ų┌Ż¼▒ŠšnŅ}ĮM└¹ė├Ž▐ųŲīė║═└wŠS╝s╩°Ą─å╬ÜŌŪ╗“īäėŲ„ĮYśŗįOėŗŻ¼▓ó╗∙ė┌ļŖ╚▌ūā╗»įŁ└Ē└¹ė├ĮķļŖÅŚąį▓─┴ŽųŲū„╚ßąįé„ĖąŲ„Ż¼įOėŗ┴╦╚ńłD9Ż©aŻ®╦∙╩ŠĄ─╝»│╔╚ßąįé„ĖąŲ„Ą─ÜŌäė▄ø¾w┐ĄÅ═╩ųŻ¼Ė─ūāŽ▐ųŲīėĘĮŽ“Ż¼┐╔ęį▌oų·╚╦╩ųĘųäeīŹ¼Fų„äė╔ņš╣║═ų„äėŪ³Ū·▀\äėŻ¼▓óÖz£y╩ųųĖÅØŪ·ĮŪČ╚▀Mąą┐ĄÅ═ą¦╣¹įu╣└[13]ĪŻĄ½╩ŪįōÜŌäė▄ø¾w┐ĄÅ═╩ų¤oĘ©▌oų·╚╦╩ųīŹ¼F─┤ųĖĄ─ā╚╩š/═Ōš╣▀\äėŻ¼ę▓¤oĘ©═¼ĢrīŹ¼F╔ņš╣/Ū³Ū·▀\äėĄ─ļpŽ“ų„äėė¢ŠÜĪŻ×ķ┤╦Ż¼▒ŠšnŅ}ĮMėų└¹ė├▓©╝y╣▄ųŲū„Ą─š²žōÜŌē║“īäėŲ„ųŲū„┴╦╚ńłD9Ż©bŻ®╦∙╩ŠĄ─ÜŌäė▄ø¾w┐ĄÅ═╩ųĪŻįōÜŌäė▄ø¾w┐ĄÅ═╩ųāHėą149┐╦Ż¼▓╔ė├ķ_Ę┼╩Į╩ų╠ūŻ¼═©▀^ŪĘ“īäė┐╔ęį▌oų·╩ųųĖīŹ¼F╔ņš╣/Ū³Ū·▀\äė║═─┤ųĖĄ─ā╚╩š/═Ōš╣▀\äėĄ─ų„äėė¢ŠÜŻ╗┼õ╠ūĄ─▒Ńöy╩ĮÜŌäėŽõ¾wĘeąĪĪóųž┴┐▌pŻ¼Ė▀╝ē┐ĄÅ═░µÜŌäėŽõ┐╔š{╣Ø┴∙éĆ▌ö│÷ÜŌ┬ĘĄ─ē║┴”║═┴„┴┐Ż╗īŹ“×▒Ē├„Ż¼╔ņš╣/Ū³Ū·“īäėŲ„į┌╔ņš╣ĢrĄ─ūŅ┤¾ū„ė├┴”×ķ4.6NŻ¼ā╚╩š/═Ōš╣“īäėŲ„į┌ā╚╩šĢrūŅ┤¾ū„ė├┴”×ķ8.1NĪŻ«öŪ░Ż¼įōÜŌäė▄ø¾w┐ĄÅ═╩ųĄ─“īäėŲ„įOėŗĪó┐žųŲįOėŗ╚įį┌▓╗öÓĄž▀Mąąā×╗»ĪŻ

4Īó╩ų▓┐ų„▒╗äė┐ĄÅ═ė¢ŠÜŽĄĮyįOėŗ
Ė∙ō■╩ų▓┐ų„▒╗äėė¢ŠÜĄ─┐ĄÅ═ąĶŪ¾Ż¼╗∙ė┌šnŅ}ĮMį┌▀\äėęŌłDūRäeĪó─XÖCĮė┐┌Īó▄ø¾w╩ųĄ╚ĘĮ├µĄ─蹊┐╗∙ĄAŻ¼įOėŗ┴╦ę╗ĘN┐╔┐ĄÅ═ė¢ŠÜ┐╔╚š│Ż╔·╗Ņ▌oų·Ą─┤®┤„╩Įų„▒╗äė┐ĄÅ═ė¢ŠÜŽĄĮyŻ¼ŽĄĮyĄ─ų„ę¬╣”─▄░³└©Ż║ČÓĘČ╩Į┤╠╝żĪóŠ½╝ÜęŌłDĖąų¬ĪóČÓ─Ż╩ĮęŌłDūRäeĄ╚[14]ĪŻ
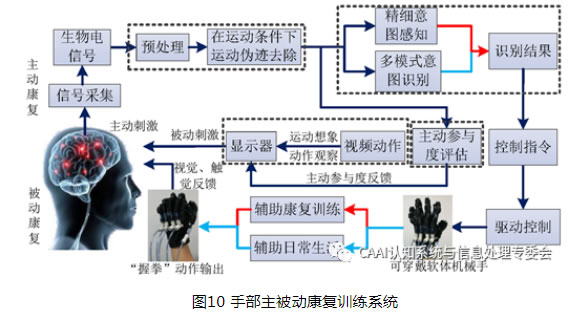
╩ų▓┐ų„▒╗äėė¢ŠÜŽĄĮy┐╔Ęų×ķų„äė┐ĄÅ═║═▒╗äė┐ĄÅ═ā╔éĆ▓┐ĘųĪŻį┌ų„äė┐ĄÅ═ė¢ŠÜųąŻ¼ī”ė┌╗╝š▀ų„äėęŌłDĄ─Ėąų¬ėąā╔ĘNŻ║ę╗ĘN╩Ūį┌ČÓĘČ╩Į┤╠╝ż┤¾─XŲżīėĄ─╗∙ĄA╔ŽŻ¼Å─į÷ÅŖĄ─EEG ųąų▒Įė╠ß╚Īå╬é╚╩ų▓┐╔ņ-╬šäėū„Š½╝ÜęŌłDĄ─EEG ╠žš„Ż¼īŹ¼Fī”╩▄įćš▀╩ų▓┐äėū„Ą─Š½╝ÜęŌłDĖąų¬Ż╗┴Ēę╗ĘN╩Ū░lō]▓╗═¼─Ż╩Į╚ńEEGĪóč█ļŖłD(ElectrooculogramŻ¼EOG)║═╝ĪļŖłD(Electromyogram, EMG)─Ż╩ĮĄ─ā×ä▌Ż¼śŗĮ©ČÓ─Ż╩Įģf═¼┐žųŲ▓▀┬įęį«a╔·Ė³ČÓĄ─┐žųŲųĖ┴ŅĪŻį┌▒╗äė┐ĄÅ═ė¢ŠÜųąŻ¼═©▀^ų„äė▀\äėęŌłD«a╔·Ą─┐žųŲųĖ┴Ņ╗“ų▒Įė▌ö╚ļųĖ┴Ņī”▄ø¾w┐ĄÅ═╩ų▀Mąą“īäė┐žųŲŻ¼īŹ¼F▄ø¾w┐ĄÅ═╩ų▌oų·╩ų▓┐ł╠ąą┐ĄÅ═ė¢ŠÜ╗“▀Mąą╚š│Ż╔·╗ŅĪŻīŹ“ד×ūC┴╦ŽĄĮy▌oų·╗╝š▀į┌ŠĆ▒╗äė┐ĄÅ═ė¢ŠÜŻ¼═©▀^š²│Ż╩▄įćš▀į┌ŠĆ┐žųŲ┐ĄÅ═ÖCąĄ╩ų▌oų·ł╠ąą╔ņ-╬šäėū„Ż¼ŲõŲĮŠ∙š²┤_┬╩▀_ĄĮ92.71%Ż¼╗∙▒ŠØMūŃų„▒╗äė┐ĄÅ═ė¢ŠÜĄ─ę¬Ū¾Ż¼ę▓╠ß╔²┴╦ų„▒╗äė┐ĄÅ═ŽĄĮyĄ─īŹė├╗»╦«ŲĮĪŻ═¼ĢrŻ¼įō╩ų▓┐ų„▒╗äė┐ĄÅ═ė¢ŠÜŽĄĮy│╔╣”į┌ČÓ╝ęßtį║║═ā╔╝ęŲ¾śI▀Mąą┐ĄÅ═įćė├ĪŻ

ģó┐╝╬─½IŻ║
[1] De V, Mulder T. Motor imagery and stroke rehabilitation: a criticaldiscussion[J]. Journal of Rehabilitation Medicine, 2007, 39(1):5©C13.
[2] Åł▀M╚AŻ¼═§ĒwŻ¼║ķ▄ŖŻ¼Ą╚Ż«▄ø¾wÖCąĄ╩ų蹊┐ŠC╩÷[J]Ż«ÖCąĄ╣ż│╠īWł¾Ż¼2017Ż¼53(13)Ż║19-28Ż«
[3] Schwartz A B. Cortical neural prosthetics[J]. Annual Review ofNeuroscience, 2004, 27(27):487©C507.
[4] Daly J, Wolpaw J. Brain-computer interfaces in neurologicalrehabilitation[J]. Lancet Neurology, 2008, 7(11):1032©C1043.
[5] Bundy D, Souders L, Baranyai K, et al. Contralesional brain©Ccomputerinterface control of a powered exoskeleton for motor recovery in chronic strokesurvivors[J]. Stroke, 2017, 48(7):1908©C1915.
[6] V©órkuti B, Guan C, Pan Y, et al. Resting state changes in functionalconnectivity correlate with movement recovery for BCI and robot-assistedupper-extremity training after stroke[J]. Neurorehabilitation and NeuralRepair, 2013, 27(1):53©C62.
[7] Li L, Jing W, Xu G, et al. The study of object-oriented motor imagerybased on EEG suppression[J]. Plos One, 2015, 10(12):e0144256.
[8] Whyte J, Dijkers MP, Hart T, et al. The importance of voluntarybehavior in rehabilitation treatment and outcomes[J]. Archives of physicalmedicine and rehabilitation, 2019, 100(1):156©C163.
[9] Zhang J, Wang B, Li T, et al. Non-invasive decodingof hand movements from electroencephalography based on a hierarchical linearregression model[J]. Review of Scientific Instruments, 2018, 89(8):084303.
[10]In H, Kang B B, Sin M K, et al.Exo-Glove: A Wearable Robot for the Hand with a Soft Tendon Routing System[J].IEEE Robotics & Automation Magazine, 2015, 22(1):97-105.
[11]Polygerinos P, Wang Z, GallowayK, et al. Soft robotic glove for combined assistance and at-homerehabilitation[J]. Robotics & Autonomous Systems, 2015, 73(C):135-143.
[12]Towards a soft pneumatic glovefor hand rehabilitation[C]// 2013 IEEE/RSJ International Conference onIntelligent Robots and Systems. IEEE, 2014.
[13]Jinhua Zhang, Hao Wang, Jiaqing Tang, Huaxia Guo, Jun Hong. Modelingand design of a soft pneumatic finger for hand rehabilitation[C] IEEEInternational Conference on Information and Automation. IEEE, 2015: 2460 ©C2465.
[14] Zhang J, Wang B, Zhang C, et al. An EEG/EMG/EOG based multimodalhuman-machine interface to real-time control of a soft robot hand[J]. Frontiersin Neurorobotics, 2019, 13:7.