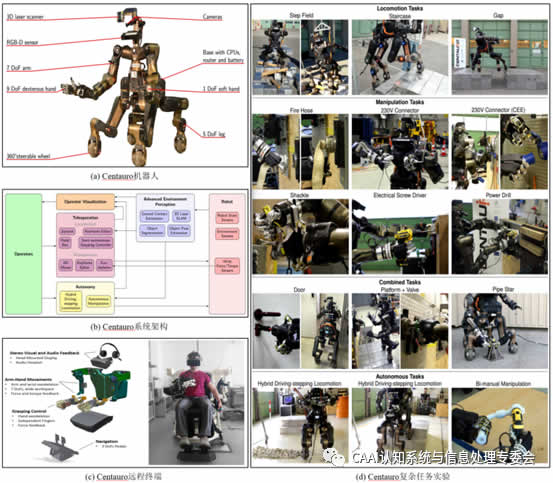
Centauro[11]是德國伯恩大學(xué)計(jì)算機(jī)學(xué)院研制的遙操作輪腿復(fù)合的移動(dòng)操作機(jī)器人(如圖5(a)(b))。Centauro整體采用與半人馬相似的構(gòu)型,頭部配備一個(gè)3維激光雷達(dá),實(shí)現(xiàn)對環(huán)境的三維建zhon圖和感知;頭部下端四周配置3個(gè)廣角相機(jī)用于實(shí)時(shí)監(jiān)控各部分的運(yùn)動(dòng)狀態(tài);頸部配備一臺(tái)kinect相機(jī)用于對抓取目標(biāo)物體的識(shí)別和姿態(tài)估計(jì);肩部配備兩個(gè)七自由度的機(jī)械臂和9自由度的機(jī)械手,可以完全模仿人體手臂的全部運(yùn)動(dòng),機(jī)械手腕部配備扭力傳感器和手部配備壓力傳感器,用于操作端的力反饋;行走機(jī)構(gòu)由四個(gè)5自由的機(jī)械腿構(gòu)成,可完成人體腿部運(yùn)動(dòng)的模仿,每個(gè)腿部具有獨(dú)立驅(qū)動(dòng)的主動(dòng)輪,可實(shí)現(xiàn)平整路面快速移動(dòng)和復(fù)雜路面的步態(tài)運(yùn)動(dòng),腿部運(yùn)動(dòng)由基座的兩個(gè)RGB相機(jī)實(shí)時(shí)監(jiān)控;控制單元由三個(gè)PC構(gòu)成,分別負(fù)責(zé)基礎(chǔ)系統(tǒng)控制,視覺感知處理和高級(jí)功能控制(多傳感器數(shù)據(jù)融合)。操作者可通過遠(yuǎn)程操作平臺(tái)(如圖5(c))實(shí)時(shí)操作Cantauro完成各種復(fù)雜操作任務(wù),通過簡單設(shè)置,Centauro通過融合自身攜帶的多傳感器信息可實(shí)現(xiàn)自主移動(dòng)和抓取操作。Tobias Klamt[12]測試了Centauro在多種操作任務(wù)中的系統(tǒng)穩(wěn)定性(如圖5(d))。
【聲明:轉(zhuǎn)載此文出于傳遞更多信息之目的,并不意味著贊同其觀點(diǎn)或證實(shí)其描述,文章內(nèi)容僅供參考,如有侵權(quán),請聯(lián)系刪除。】
假肢腕設(shè)計(jì)的有效基準(zhǔn)能夠做3自由度運(yùn)動(dòng),即旋前/旋后、屈伸和橈側(cè)/尺側(cè)偏移,未受影響的腕關(guān)節(jié),其最大活動(dòng)范圍通常在76度/85度
旋轉(zhuǎn)器用于使終端設(shè)備沿前臂的縱向放出或滾動(dòng),而屈肌使終端設(shè)備彎曲或俯仰, OB棘輪式旋轉(zhuǎn)手腕,被動(dòng)腕部裝置的鎖定也可以通過使用不可反向驅(qū)動(dòng)的機(jī)構(gòu)來實(shí)現(xiàn)
2自由度腕部由一個(gè)與旋轉(zhuǎn)器串聯(lián)的屈肌單元組成,形成一個(gè)U型關(guān)節(jié)。其中一種設(shè)備是OBRoboWrist ,它可以同時(shí)鎖住前旋和屈曲,當(dāng)解鎖時(shí),還可以通過轉(zhuǎn)動(dòng)手腕上的項(xiàng)圈來調(diào)節(jié)運(yùn)動(dòng)產(chǎn)生摩擦阻力
3自由度人工手腕在某些方面優(yōu)于人類的手腕,如運(yùn)動(dòng)范圍或扭矩輸出。盡管一些假肢在設(shè)計(jì)中加入了3自由度手腕,但串行3自由度手腕設(shè)備在機(jī)器人應(yīng)用中更普遍
具有相同數(shù)量自由度的設(shè)備之間進(jìn)行比較時(shí),串行機(jī)構(gòu)往往比并行機(jī)構(gòu)更長,對于串行機(jī)構(gòu),運(yùn)動(dòng)范圍和扭矩規(guī)格通常簡單地由執(zhí)行機(jī)構(gòu)的選擇和基本形狀幾何決定
假肢需要直接的人類互動(dòng)來發(fā)揮功能,而機(jī)器人手腕則完全是主動(dòng)的,假腕還包括外部可調(diào)節(jié)功能,如可調(diào)節(jié)摩擦或鎖定;機(jī)器人手腕的任何調(diào)整通常都是在控制系統(tǒng)內(nèi)完成的
由于軟體材料的發(fā)展,靈巧手也開始柔軟起來,如柏林工業(yè)大學(xué)研制的軟體、欠驅(qū)動(dòng)、柔性多指靈巧手、康奈爾大學(xué)研制的軟體多指靈巧手、北京航空航天大學(xué)研制的軟體多指靈巧手
環(huán)境感知技術(shù):機(jī)器人感知環(huán)境及自身狀態(tài)的窗口、運(yùn)動(dòng)控制技術(shù):定位導(dǎo)航與運(yùn)動(dòng)協(xié)調(diào)控制、人機(jī)交互技術(shù):人機(jī)有效溝通的橋梁
宋云峰博士分享了LDV激光測振及3D視覺傳感技術(shù)在智能機(jī)器人中的應(yīng)用,主要介紹了智能機(jī)器人光學(xué)感知技術(shù)、LDV激光測振及3D視覺傳感技術(shù)原理及產(chǎn)品介紹、應(yīng)用案例分享等內(nèi)容
新型智能抓取機(jī)器人,結(jié)合深度學(xué)習(xí)方法,賦予機(jī)器人主動(dòng)探索感知的能力,解決了Affordance Map缺陷,提高了機(jī)器人在復(fù)雜環(huán)境下的抓取成功率
新加坡國立大學(xué)(NUS)的研究人員利用英特爾的神經(jīng)形態(tài)芯片Loihi,開發(fā)出了一種人造皮膚,使機(jī)器人能夠以比人類感覺神經(jīng)系統(tǒng)快1000倍的速度檢測觸覺
1高性能減速器;2高性能伺服驅(qū)動(dòng)系統(tǒng);3智能控制器;4智能一體化關(guān)節(jié);5新型傳感器;6智能末端執(zhí)行器